At this moment it is not foreseen that follower vessels (FV) will be fully unmanned. The reason is that responses for certain calamities and manoeuvres are difficult to automate. However for the economic viability of the vessel train (VT) cost savings are essential. It means that crewmembers of the follower vessels shall not be called upon the bridge to perform standard navigation related tasks.
The navigation and control requirements have been defined based on the assumption that on the follower vessel one boat master is available to respond to emergency situations. During regular sailing however he has no role, allowing him to rest or perform other tasks.
Once “hooked” to the vessel train, the VT Management System on the FV will take care of:
- Track keeping as defined by Leader Vessel (LV), including passage of narrows (e.g. bridges).
- Distance keeping to LV or the FV in front.
- Initiation of stopping manoeuvre when required.
The boat master will be called to action by use of the VT Management System:
- When approaching the destination port to leave VT.
- To perform an emergency manoeuver.
- To respond to any malfunction on board of the FV.
- To pass locks.
The general layout of the Vessel Train Management System is shown in the figure below. In this concept every vessel has an identical command module. This means that every vessel can act as FV or as LV. To support the command module existing sensors and actuators will be used for speed and rudder control. Technical requirements for supporting equipment like GPS, GPS Compass, AIS, data communication & band-with, etc. need further investigation.
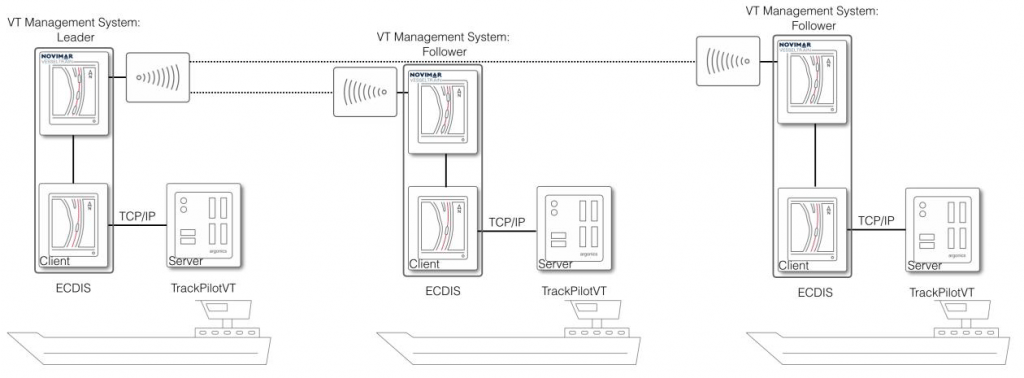
Figure 1 Vessel Train Management System
For the VT two operation modes have been defined: assisted guidance and automatic guidance. In assisted guidance, the VT follower will follow the path of the VT leader vessel, thus giving the operator the freedom to manually steer the VT around stationary objects (Figure 2).
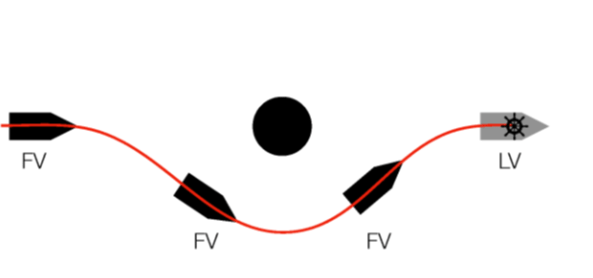
Figure 2 Operation mode “assisted guidance”
In automatic guidance, the VT follows a guiding line as a whole. This mode assists the VT operator in handling of encountering traffic. He will have the additional freedom to influence the lateral offset to the guiding line (Figure 3) which is applied to all followers immediately. Means will be provided to automatically adjust the lateral offset individually on the follower vessels, if the VT relevant fairway is not wide enough.
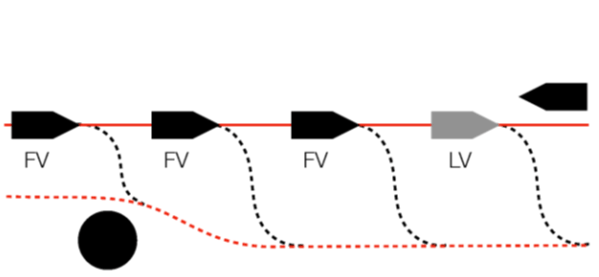
Figure 3 Operation mode “automatic guidance”
Having defined these principals, further research is in progress. This includes aspects like optimum distance between the vessels in the VT, responses to calamities, insight in amount of data traffic exchanged and the amount of Artificial Intelligence needed.
